

 دسته: برق ، الکترونیک و مخابرات
دسته: برق ، الکترونیک و مخابرات در این پروژه، با استفاده از کنترل مدل لغزشی به کنترل کردن سیستم چندمتغیره آونگ معکوس چرخان می پردازیم مباحث تئوری بصورت کامل ارائه شده است و نتایج آن هم با استفاده از نرم افزار سیمولینک شبیه سازی شده است
قیمت فایل فقط 10,000 تومان

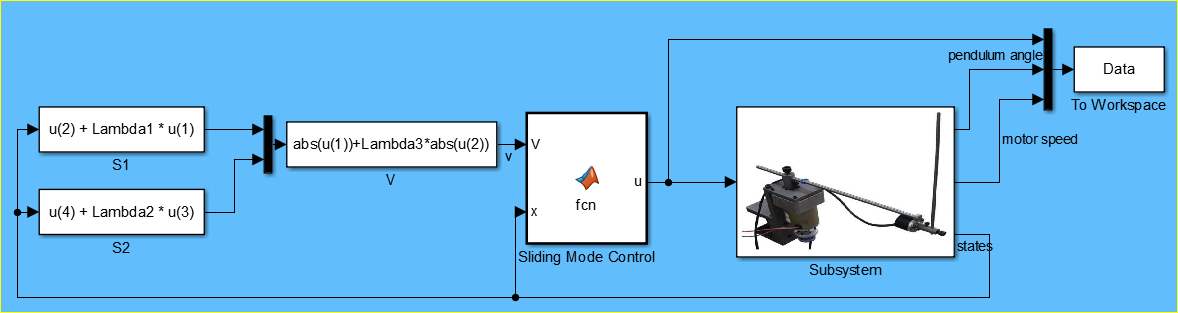
کنترل مد لغزشی بدلیل توانایی کنترل فرآیندهای با عدم قطعیت زیاد اهمیت ویژه ای پیدا کرده است. در این استراتژی کنترلی معادلات غیرخطی دارای عدم قطعیت سیستم که از مرتبه n است، با انتخاب مناسب یک سطح لغزش به یک معادله دیفرانسیل غیرخطی مرتبه اول تبدیل می شود و مسئله کنترل پلانت مرتبه n غیرخطی تبدیل به کنترل کردن دینامیک سطح لغزش که از مرتبه یک است، می شود. سپس با انتخاب مناسب قانون کنترل کاری می کنیم که حتی با وجود عدم قطعیت ها، حالت های سیستم بر روی سطح لغزش بمانند و چون انتخاب سطح لغزش اختیاری است، آنرا به نحوی انتخاب می کنیم که مشخصات سیستم حلقه بسته مطلوب را داشته باشد.
در این پروژه، با استفاده از کنترل مدل لغزشی به کنترل کردن سیستم چندمتغیره آونگ معکوس چرخان می پردازیم. مباحث تئوری بصورت کامل ارائه شده است و نتایج آن هم با استفاده از نرم افزار سیمولینک شبیه سازی شده است.
قیمت فایل فقط 10,000 تومان
برچسب ها : کنترل مد لغزشی , آونگ معکوس چرخان , سطح لغزش , قانون کنترل , عدم قطعیت , معیار لغزش